728x90
반응형
선 연결
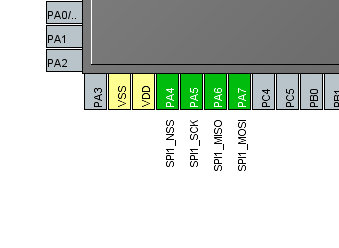
Master - Slave
PA4 - PA4 (칩선택)
PA5 - PA5 (클럭)
PA6 - PA6 (Master in Slave Out)
PA7 - PA7 (Master out Slave in)
이렇게 1:1로 연결 하면됩니다~
다른 통신과는 다르게 Tx-Rx 이런식으로 반대로 연결할 필요가 없습니다.
마스터 부분

#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi1;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_SPI1_Init(void);
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f)
{
uint8_t temp[1]={ch};
HAL_UART_Transmit(&huart1, temp, 1, 2);
return(ch);
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t T_buffer[3] = {'A','B','C'};
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_SPI1_Init();
/* USER CODE BEGIN 2 */
printf("SPI MASTER\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
HAL_SPI_Transmit(&hspi1,T_buffer,4,1000);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}Slave 부분

#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi1;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI1_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f)
{
uint8_t temp[1]={ch};
HAL_UART_Transmit(&huart1, temp, 1, 2);
return(ch);
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t T_buf[10];
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
printf("SPI SLAVE\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_4)){
HAL_SPI_Receive(&hspi1,T_buf,10,1000);
printf("%s\r\n",T_buf);
}
//HAL_Delay(500);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}결과

이렇게 Slave 부분에서 마스터에서 보낸 값을 보내 줍니다.
근데 대충 짜서 그런지...2번째 줄에서 B가 누락 되네요~ㅠ
728x90
반응형
'공부 > STM32F4' 카테고리의 다른 글
| [STM32F401CCU6] USB CDC (0) | 2022.03.30 |
|---|---|
| 19. [STM32F429] ADC Polling (0) | 2021.09.15 |
| stm32cubeIDE (0) | 2020.10.05 |
| 17. [STM32F429] A4988 스텝모터 구동 (1) | 2020.06.01 |
| mpu_arm7.h 에서 에러 (0) | 2020.05.22 |



